完璧に分かるホンダ自立バイクの仕組み
2017/7:発行
2022/5:一部改訂
2022/5:一部改訂
目次
はじめに
2017/1/5、ラスベガの国際家電見本市(CES) において、ホンダから自立バイクが発表されました。

ラスベガのCES(国際家電見本市)2047で にホンダから発表された自立バイク
人が乗ってもいないのに、2輪のバイクが倒れずにゆっくり動く姿を見て、度胆を抜かれた方も多いと思います。
人が乗ってもいないのに、倒れずにゆっくり進むバイク
何故倒れないの?
何をどうやって制御しているの?
ホンダの説明資料を見ると、アシモの技術を応用しているだの、通常のバイクとは異なるネガティブ・キャスタートレイルを採用したからと書かれているものの、それだけでは全く納得できません。
特にポジティブ・キャスターでも、ハンドルを傾ければ左右の重心位置を調整できるにも関わらず、なぜネガティブ・キャスタートレイルを採用したのか?
どう考えても分からず、特許資料等を調べてようやくその謎を解き明かせましたので、ここにそれを包み隠さずご紹介したいと思います。
ただしその肝の部分を知ってしまうと、いかにこのバイクの市販化が難しいかを、如実に分かってしまうのが寂し所です。
ネガティブ・キャスタートレイルとは
お恥ずかしい話ですが、実はこの自立バイクについて調べるまで、全くもって知らなかった事が2つあります。
先ず1点目が、バイクのキャスタートレイルをいとも簡単にネガティブにできる事です。
ちなみにキャスタートレイルに関する詳細は、こちらをご覧願います。
下の図をご覧頂きます様に、通常のバイクでしたら、いくら前輪を寝かせてもキャスタートレイルは、常にポジティブ(プラス)のままです。
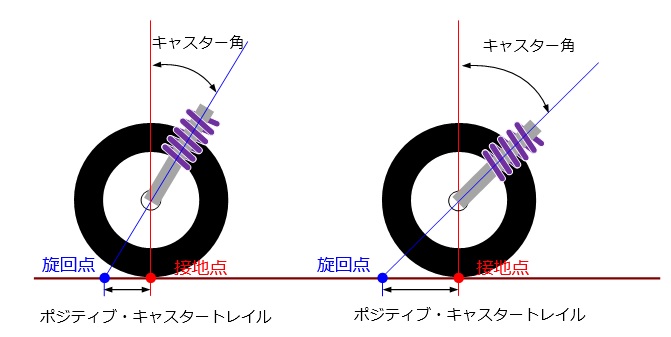
前輪を寝かせてもキャスタートレイルは常にポジティブ
すなわち、タイヤの接地点より前方に前輪の旋回点があります。
もしネガティブにするのならば、前輪を前後逆に付けなくてはなりません。
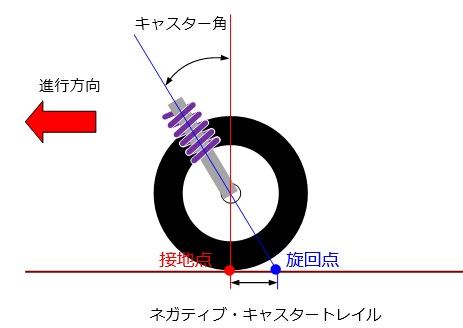
キャスタートレイルをネガティブにするには前輪を逆向きに取付けなければならない
不思議に思ってホンダの資料を見てみると、何とフロントフォークの中心軸とハンドルの回転軸が違うではありませんか。
こんなに簡単にキャスタートレイルをネガティブにできるとは、考えてもみませんでした。
これでだけでも、このバイクの独創性の高さが伺えます。
ただし、これでスピードを出して走ったらとんでもない事になります。
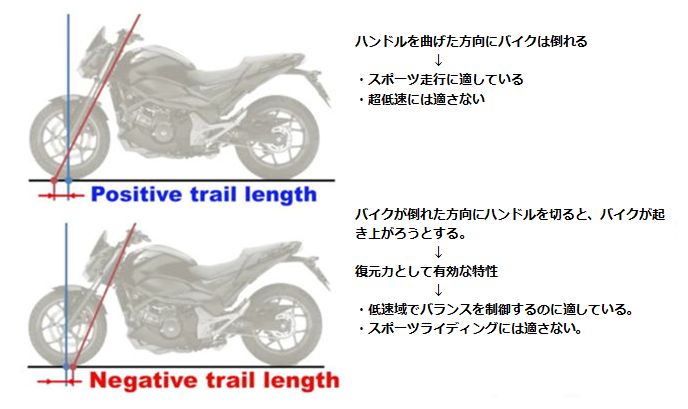
キャスタートレイルがポジティブの場合でしたら、前輪には真っ直ぐになろうとする力が働くので、直進性が良くなります。
ところがネガティブの場合、少しでハンドルが傾いたら、その方向にハンドルを曲げ様とする力が働くので、真っ直ぐ走るのがとてつもなく難しくなるからです。
例えば、キャスターの付いた車輪が下図の様に向いた台車を、勢い良く矢印方向に押したとするとどうなるでしょう。
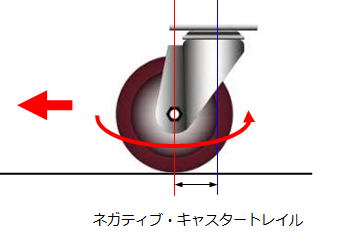
どなたも経験があると思いますが、キャスターは一気に180度回転して反対側を向いてしまいます。
それと同じ様な事が、バイクに起こるのですから、とてもじゃないですが怖くて乗れません。
キャスタートレイルをネガティブにできるのは、超低速時のみなのは間違いありません。
なおホンダの資料では、キャスタートレイルをトレイルレングス(trail length)と呼んでいますが、本書ではこのままキャスタートレイルと呼ぶ事にします。
ネガティブ・キャスタートレイルの目的
そんな不安定なネガティブ・キャスタートレイルにした目的は、何なのでしょうか?
ヒントは先ほどのホンダの資料に隠されていました。
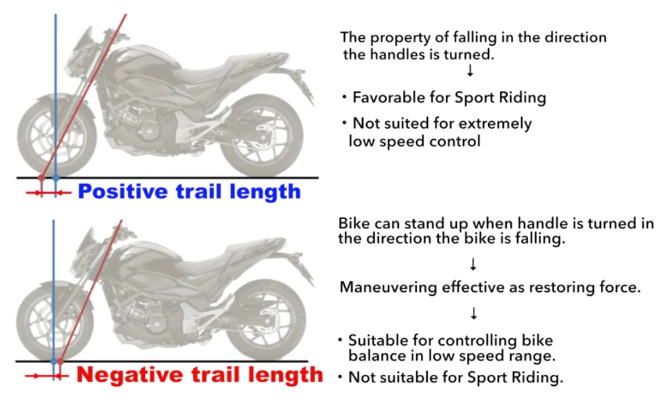
いかにも日本人が直訳した感じの英語で、少々分かり難いのですが、恐らく元の日本語はこうだったのだろうなと思って訳すと以下の様になります。
ご覧頂きます様に、かなり重要なヒントが散りばめられています。
要点としては、低速域でバランスを取るには、ネガティブの方が適している、という事です。
なお日経アジアの記事に以下のスライドが添付されていましたが、こちらの方がよほど自然な英語です。
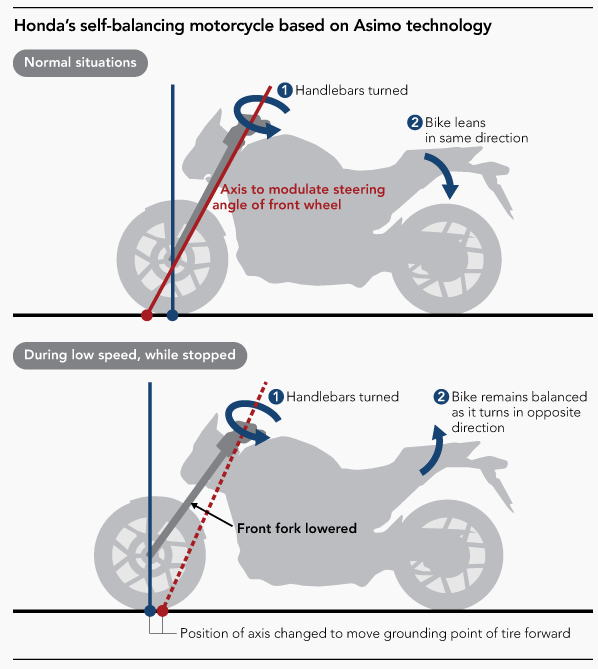
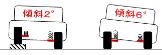
ただし、ヒントの記述は少々変わって、ポジティブ・キャスタートレイルの時はハンドルを切るとハンドルを切った方向に車体は傾き、ネガティブの時はハンドルを切った反対側に傾くとあります。
どちらも同じ事を言っている様です。
ハンドルを曲げると重心がずれる
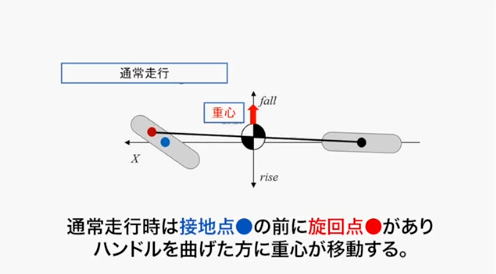
そして全く以って知らなかった事の2点目は、前輪を曲げると、(バイクを上から見た)重心の位置が変わるという事です。
ホンダの自立バイクに関する解説資料(ポジティブ時)
これまたお恥ずかしい話ですが、よもや前輪を曲げて重心の位置が変わるとは、思ってもみませんでした。
なにしろ、ハンドルも前輪も車体の中心に付いているのですから、それを左右に振っても、重心位置は変わらないと固く信じていたからです。
ですが、確かに上の図の様に、タイヤが地面に接触している所と、タイヤの回転軸は異なるので、前輪を曲げれば重心位置は変わります。
上の図はキャスタートレイルがポジティブの場合ですが、この場合前輪を曲げた方向に重心が移動しているのが分かります。
ですので、下の写真の様にハンドルを曲げた方向に車体は傾きます。

キャスタートレイルがポジティブの場合、ハンドルを曲げた方向に車体は傾く
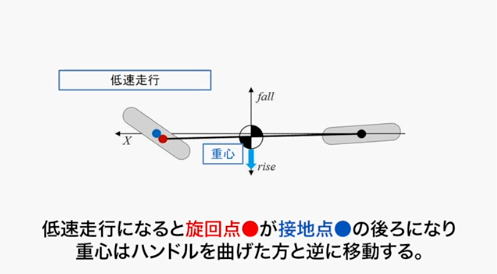
一方下の図はキャスタートレイルがネガティブの場合ですが、この場合前輪を傾けたのと反対の方向に重心が移動しているのが分かります。
ホンダの自立バイクに関する解説資料(ネガティブ時)
という事はポジティブの反対で、下の写真の様にハンドルを曲げたのと反対方向に車体は傾く事になります。

実に興味深い特性であるとともに、ホンダの技術者が良く気が付いたなと感心します。
ポジティブでバランス調整
さてこれで、自立バイクに監視て2つのメイン機構が分かりました。
①フロントフォークの中心軸とハンドルの回転軸を変えると、バイクのキャスタートレイルをいとも簡単にネガティブにできる。
②前輪を曲げると、(バイクを上から見た)重心の位置が変わる。
これからは、この二つの機構を組み合わせて、バイクのバランス調整をやってみたいと思います。
重心の位置は、キャスタートレイがポジティブでもネガティブでも変える事ができますので、初めにポジティブの場合を考えてみます。
先ず、垂直状態でバイクが自立しているとします。
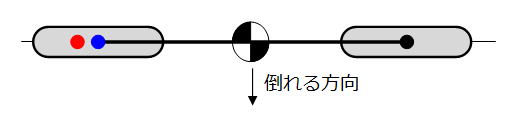
すると、やがて上下いずれかの方向にバイクは傾き始めます。
上図の場合でしたら、車体が下方向に傾くとします。
そのままにしていると、完全に倒れてしまいますので、少しでも傾いたら重心の位置を上側に戻してやる必要があります。
そのためにはどうするかと言えば、前輪を上向きに曲げてやれば良いのです。
そうすれば、重心の位置を中心に戻して、またバイクを垂直にする事ができます。
ネガティブでバランス調整
それでは次にキャスタートレイをネガティブにした場合のバランス調整です。
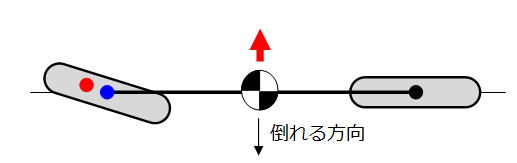
先ず、垂直状態でバイクが自立しているとします。
すると、やがて上下いずれかの方向にバイクは傾き始めます。
上図の場合でしたら、下方向に傾くとします。
このままにしていると、完全に倒れてしまいますので、少しでも傾いたら重心を上側に戻してやる必要があります。
そのためにはどうするかと言えば、前輪の下向きに曲げてやれば良いのです。
そうすれば、重心の位置を中心に戻して、またバイクを垂直にする事ができます。
ですが、ここで大きな疑問が湧いてきます。
今までご覧頂きました様に、キャスタートレイルがネガティブでもポジティブでも、向きは逆ですが前輪を曲げれば重心を移動して、バイクを垂直に戻す事が可能です。
にも関わらず、なぜホンダは手間の掛かるネガティブ・キャスタートレイルにこだわったのでしょうか?
この謎を解かずして、自立バイクの解説記事とは言えません。
特許資料
そのヒントを探ろうと、ホンダの自立バイクに関する特許資料(特許6081238)も調べてみた所、以下の記載が見つかりました。
【0013】
詳細は後述するが、本願発明者の各種実験、検討によれば、車体の姿勢を安定化するために適切なモーメントを前輪の操舵によって車体に作用させるようにする上では、トレール長は、ある正の値よりも小さい(ゼロもしくは負の値を含む)ことが好ましい。
また、該トレール長が小さいほど(負の値である場合は絶対値が大きいほど)、前輪の操舵角の単位変化量に対して発生させ得る上記モーメントを大きくすることができる。
【0014】
そして、移動体の停車時のように、車体の姿勢を安定化することの要求度合が高い状況では、該姿勢の安定化のために、前輪の操舵によって十分なモーメントを感度よく発生できることが望ましい。
したがって、このような状況では、トレール長は、ある程度小さい方が好ましい。さらには、トレール長が負の値であれば、一層好ましい。
これをご覧頂きます様に、キャスタートレイルはネガティブで、長い方(絶対値が大きい方)が制御し易いと述べられてはいるのですが、その理由はどうしても見当たりません。
なぜネガティブを選択したのか
何故ネガティブを選択したのか分からず、数か月経ってしまったのですが、さんざん悩んだ挙句(あげく)ようやく分かりました。
確かに静的に考えると、ネガティブでもポジティブでも同じ様に制御できるのですが、動的に考えると違いが見えてきます。
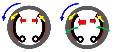
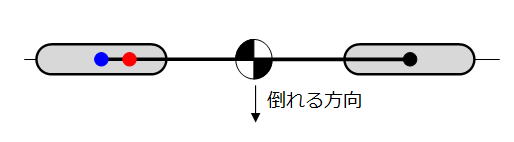
先ずキャスタートレイルがポジティブの場合ですが、車体が下方向に倒れたので、前輪を上(緑の矢印)方向に曲げたとします。
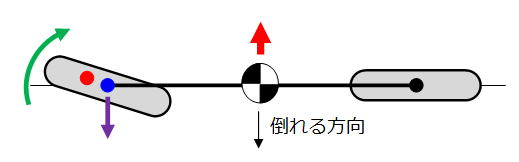
前輪を上方向に曲げると、その反作用で車体は下方向に傾こうとする
その際動的に考えると、前輪を上方向に曲げるのに伴って、その反作用で車体を下方向に傾ける力(紫の矢印)が働きます。
という事は、車体が傾いている方向に更に車体を傾ける事になり、傾きを助長する事になります。
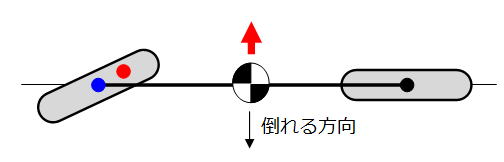
一方キャスタートレイルがネガティブの場合は、車体が下方向に倒れたので、前輪を下(緑の矢印)方向に曲げます。
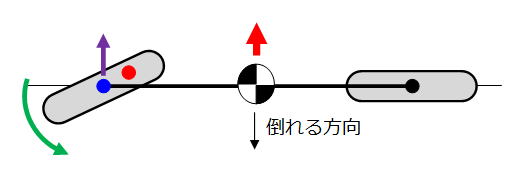
前輪を上方向に曲げると、その反作用で車体は起き上がろうとする
すると、その反作用で車体を起こす力(紫の矢印)が働きます。
という事は、車体が中心方向に引き戻されるという事になり、傾きを回復するには有利になります。
このためホンダの技術者は、キャスタートレイルがネガティブになる様にしたのです。
もっと言うと、ポジティブのままでは、この反作用によってどうしても車体を引き起こせなかったので、ネガティブにせざるを得なかったのかもしれません。
限界
この事が分かってくると、このバイクの限界も自(おの)ずと分かってきます。
恐らく動画で自立バイクがゆっくり動く姿を見ると、もっと開発が進めば、無人でサーキットも走れる様になると思われないでしょうか?

自立バイクの無人低速走行シーン
ですが、残念ながらその様な事は決してありません。
前述の様に、この自立システムが倒れそうなバイクを復帰させる力は、前輪を傾ける事による重心の移動とその反作用だけなのです。
当然ながら重いエンジンが中央に鎮座したバイクですので、その傾きをそれだけで修正できるのは、限界があります。

真上から見たCBR250R
非常に感覚的な値ですが、制御できる傾きはせいぜい±1~2度程度の範囲内ではないでしょうか。
動画では人が自立バイクで立ち上がるシーンがありますが、これは相当練習を積んだのでしょう。

それでも成功率は50%程度なので、(動画だけで)リアルなショーで見せるのも難しかったのでしょう。
もしそうだとしたら、それこそ突然横風が吹いただけで倒れる可能性すらありますので、このシステムで信号待ちするのはほとんど不可能と言わざるをえません。
実際自立バイクの動画も、屋内と風の吹かない玄関口までとなっています。
ですので、もしこのまま自立バイクを市販したら、信号待ちで転倒者が続出するのは間違いないでしょう。
ホンダが当面市販の予定はないと言うのは、実に妥当な判断と言えます。
ただし僅かながら希望はあります。
バイクによる自立制御には限界があるかもしれませんが、人が操作してネガティブ・キャスタートレイルのバイクに乗ると、超低速域では安定して乗れる可能性もあります。
生憎ネガティブ・キャスタートレイルのバイクに乗った事がないのですが、もしかしたらそんなバイクが近々姿を見せるかもしれません。
とは言え、低速走行時の安定性から言えばやはり3輪バイクが一番妥当かもしれません。

まとめ
それではまとめです。
①フロントフォークの中心軸とハンドルの回転軸をずらせば、キャスタートレイルを簡単にネガティブにできる。
②ハンドルを曲げると、バイクを上から見た場合の重心位置が変わる。
③キャスタートレイルがポジティブだと、前輪を曲げた方向に車体は傾き、ネガティブになると逆に傾く。
④静的にみれば、キャスタートレイルがポジティブでもネガティブも、前輪を曲げてバランスの調整は可能である。
⑤ただし前輪を曲げる事による路面からの反作用によって、キャスタートレイルがネガティブの方がバランスを制御し易い。
⑥ハンドルを左右に振ってバランスを取るバイクは、傾きを制御できる範囲が非常に狭いため、実用化は極めて難しいと思われる。
⑦ただし、人が超低速で操作するネガティブ・キャスタートレイルのバイクの可能性はある。
本書がお役に立てば幸いです。
ホンダ自立バイクの仕組み