驚くほど画期的だった
新型RAV4のダイナミックトルクベクタリングAWD
2018/12/06: 発行
2019/03/23: 更新
2019/03/23: 更新
はじめに
2016年以降、暫く日本での販売を中断していたトヨタのRAV4が、数年ぶり(2019年春)に復活するそうです。

2019年春に発売予定の新型RAV4(写真はUSAモデル)
そしてその4WDシステムに、トヨタが新たに開発したダイナミックトルクベクタリングAWD(Dynamic Torque Vectoring AWD)が投入されるそうです。
ご存知かもしれませんが、弊サイトでは雪道に強い4WDシステムのランク付けを行っていますので、本4WDシステムがどれだけの実力があるか、早速トヨタのHPで調べてみる事にしました。
恐らく2019年4月号の自動車雑誌には、本AWDシステムを搭載した雪道でのRAV4の試乗記事で溢(あふ)れるのでしょう。
ですが、本AWDシステムがどう機能するか、完全に理解して試乗される自動車評論家は殆どいらっしゃらないでしょう。
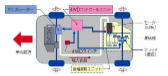
何故ならば、この新AWDシステムに関するトヨタの解説図(下図参照)は、一見非常に簡単そうに見えるのですが、実はとんでもなく複雑だからです。
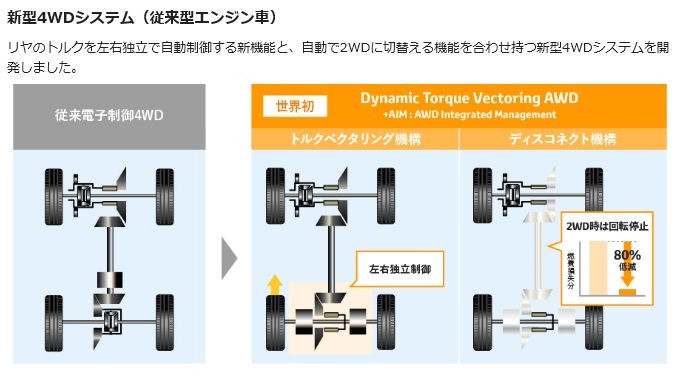
ダイナミックトルクベクタリングAWDに関するトヨタの簡単そうな解説図
と言うより、革新的だからです。
何しろ、本来4WD車にあるべき”ある物”が存在しないだけではなく、あらゆるクルマの駆動輪に存在すべき”ある物”も存在しないのですから。
ですので正直に告白しますと、この解説図は明らかに間違っている(このままではこのクルマはまともに動かない)、と結論付け様としたくらいなのです。
そして数日悩んでようやく全貌が理解できたら、何とこの新AWDシステムは当初思っていた以上の優れものだったという訳です。
どんなに画期的なのか、期待してお読み頂ければと思います。
トルクベクタリング
それではそのダイナミックトルクベクタリングAWDですが、トルクベクタリング( Torque Vectoring )とありますので、左右輪の駆動トルクを制御するのは間違いないでしょう。
|
注
一般的にはTorque Vectoring をトルクベクトリングと呼ぶべきかもしれませんが、トヨタでは何故かトルクベクタリングと表記していますので、本書ではそれに倣っています。 またトヨタでは従来より四輪駆動を4WDと呼んでいますが、このシステムではなぜか(スバルと同様に)AWDと呼んでいます。 このため本書では、従来の四輪駆動を4WD、この四輪駆動をAWD、またデファレンシャルギアをデフと短く呼ぶ事にします。 |
それによって、高速でのコーナリング性能を良くしようという訳です。
ご存知の方も多いと思いますが、このトルクベクタリングと同じ思想で作られたのが、
日産JUKEのトルクベクトル付きインテリジェント 4×4、
三菱ランサーEVOに搭載されたAYC、
本田レジェンドに搭載されたSH-AWD、
レクサスRCFに採用されたTVD
です。

JUKE16GT FOUR トルクベクトルのイメージ図

三菱ランサーEVOに搭載されたAYC(Active Yaw Control)

本田レジェンドに搭載されたSH-AWD(Super Handling All-Wheel-Drive)

レクサスRCFに採用されたTVD(Torque Vectoring Differential)
という訳で、トルクベクタリング自体は特に目新しいものではないと理解して頂いた上で、いよいよトヨタの最新AWDシステムをじっくり見てみたいと思います。
なお三菱のランサーEVOに搭載されたAYCについては、後ほどまた出てきますので、三菱のトルクベクトリング機構だと覚えておいて下さい。
ディスコネクト機構
すっかり前置きが長くなってしまいましたが、以下が(既にお見せした)ダイナミックトルクベクタリングAWDに関するトヨタの公式HPにある解説図です。
このトルクベクタリング機構については、この後にお話するとして、先ずは簡単に理解できる一番右側のディスコネクト機構について見てみましょう。
これ自体もかなり画期的です。
なぜならばこの図を見る限り、後輪のシャフトと中央の駆動部分が前輪の駆動部から完全に切り離されているからです。
今までの一般的なFFベースの4WD車でしたら、一般道ではFF走行なので経済的ですと言いいながら、その実後輪シャフトもセンターシャフトも後輪(後タイヤ)と一緒に連れ回っていたので、実質的にそれらの回転抵抗は殆ど変わらなかったのです。
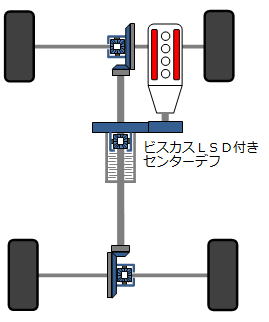
従来の4WD車の場合、全てのシャフトは走行中常時回転している
ですが本システムの場合、FF走行時はセンターシャフトも後輪のデフも回転しないので、かなりの省エネになるのは間違いありません。
解説図のグラフに、燃費損失分が80%も低減とあるのも十分納得できます。
ただしよくよく考えると、どうやって後輪の駆動を完全に絶つのか疑問もあるのですが、それは次でお話します。
ダイナミックトルクベクタリングAWD
さて、お待たせしました。
それではいよいよ、トヨタの最新トルクベクタリング機構です。
トヨタの公式HPを見ますと、以下の様に書かれています。
| エンジン車に採用する新システム「Dynamic Torque Vectoring AWD(ダイナミックトルクベクタリングAWD)」では、走行状況に応じてリアのトルクを左右独立で制御する「トルクベクタリング機構」を採用することで、ドライバーの思い通りの旋回性能と、高い悪路走破性を実現しました。 |
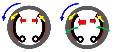
先ほどの解説図をもう一度下に添付すると、後輪のシャフトに付いている2つの丸いドラムが、左右のタイヤに駆動力を分配する電子制御カップリングなのでしょう。

赤丸が電子制御カップリング
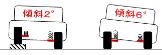
これで、カーブの外側の後輪タイヤに駆動力を多く掛けて、曲がり易くしているという訳です。
ここまでは、誰でも簡単に納得できます。
ところがここで、一番左の従来の電子制御4WDの構成と比べると、奇妙な事に気が付きます。
従来の電子制御4WDの場合、中央のシャフトに電子制御カップリングが1個付いていたのですが、新AWDシステムにおいては、それが無くなっているのです。
すなわち、センターデフがないではありませんか。
中央の電子制御カップリングは、センターデフの代わりに前後輪への駆動力を分配しますので、従来のトルクベクタリング機構のある4WDでも当然付いています。
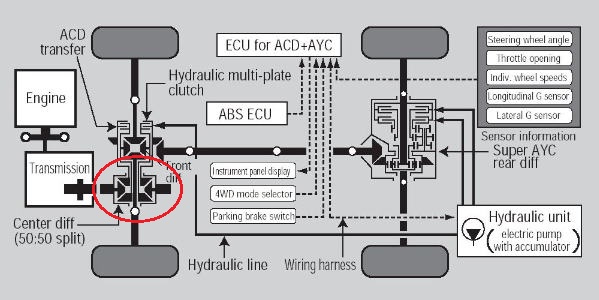
三菱のランサーEVOに搭載されたAYCの解説図(左下の赤丸がセンターデフ)
もしこれが無いと、フロントとリアの駆動力が常に50:50の前後輪直結フルタイム4WDとなり、タイトコーナーブレーキング現象が出て舗装路ではカーブを曲がれなくなってしまいます。

センターデフが無いため4WDモードでタイトコーナーブレーキング現象が出る鈴木ジムニー
またこれが無いと、エンジンの駆動が常時センターシャフトに伝わりますので、当然後輪へのディスコネクトもできません。
ディスコネクト機構の解説図を良く見ると、前輪のデフの直後で駆動が絶たれている様なので、もしかしたらここに何か秘密があるのかもしれませんが、それでも4WD中はセンターデフが無いのには変わりがありません。
|
ディスコネクト機構
2018/12/13:追記
その後更に調べた所、この新AWDシステムの前輪と後輪間の駆動は、ラチェットタイプのドッグクラッチでON/OFFさせている様です。 ですので、恐らく以下の様な形状のクラッチを使っているのでしょう。  ラチェットタイプのドッグクラッチ この場合OFF(切断)するのは簡単ですが、ON(結合)する場合に衝撃がありそうな気がしますが、後輪側のシャフトの回転速度を(後輪に付いている電子制御カップリングで)制御できるので、前後シャフトの回転数を合わせて繋ぐ事ができるのでしょう。 良く考えてあります。 |
という訳で、この解説図はどうも変だと思ってさらによくよく見ると、もう一つ信じられない事に気が付きました。
何と、リアのデフも無いではありませんか。
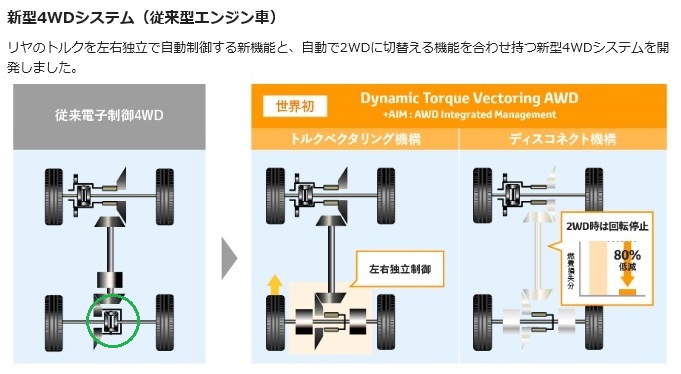
緑丸が後輪のデフ
最初はイラストが簡略化されているだけだと思っていたのですが、隣の”従来電子制御4WD”にはしっかりデフ内部のギアまで描かれています。
絶句です。
今までにリアにデフを搭載していない4WD車は、見た事も聞いた事もありません。
ですがこれでようやく謎が解けました。
本AWDシステムの場合、リアに常時直結50%の駆動力を伝えたまま、センターデフとリアデフの仕事を全て2個の電子制御カップリングが行っているのです。
ですので、例えばカーブを曲がる場合は、2個の電子制御カップリングがリアの駆動力を落とす事で、センターデフが無くてもタイトコーナーブレーキング現象が起きない様にしているのです。
いやはや、一体誰がこんな事を思い付いたのでしょう。
これによって、(制御はかなり難しそうですが)直進時も、旋回時も、悪路走行時も、雪道を走行しているときも、この電子制御カップリングがリアのタイヤの駆動力を最適に制御できるのです。
目から鱗のシステムです。
コストの絡みもあるでしょうが、いつか駆動輪に電子制御カップリングを2個搭載する事で、重くて機械損失の発生するデフの無い2輪駆動のクルマが登場するかもしれません。
新AWDシステムはどれくらい雪道に強いのか
さて、話はこれでおしまいかと思ったら、大間違いです。
むしろこれからが本題です。
実は、本AWDシステムの詳細を知る前は、トルクベクタリングを搭載しても雪道の走破性は大して変わらないと思っていました。
何故ならば、最初にご紹介した4台を見て頂きます様に、トルクベクタリングを搭載しているクルマは全てスポーツ4WDで、カーブを高速で曲がる事を前提にしていからのです。
雪道での走破性を良くしようとは、微塵もとは言わないまでも、ほとんど考えていないのは間違いありません。
なぜならば、従来のトルクベクタリングは舗装路の様にグリップが効いている場合は効果的でしょうが、μ(摩擦係数)の低い雪道ではどう考えても効果は限定的だからです。
もう少し分かり易く言うと、滑り易い路面で瞬間的に片側のタイヤにトルクを多く掛けた所で、殆ど何も変わらないからです。
むしろ、いつタイヤが滑り出すか分からない様な限界状態でしたら、トルクベクタリングが無い方が安定しているかもしれません。
実際日産のJUKEにおいては、雪道ではトルクベクタリングが働かない通常の4WDモードにする事を推奨しているくらいです。(詳細はこちら)
ですがこの新AWDシステムは、違います。
なにしろセンターにも後輪にもデフが無いのですから、エンジンから来た50%の駆動力を、右のタイヤにも左のタイヤにも自由に分配できます。
ですので、もし後輪の一つが空転したら片方に50%の駆動を掛ける事もできますし、その気になればデフを一切持たないサンドバギーの様に常時リアの左右タイヤに25%の駆動力を掛けて走る事もできるのです。

デフが一切なくて、4輪直結4WDのサンドバギー
むしろその方が、雪道では安定すると言えます。
という訳で本書の結論としましては、この新4WDシステムにおける雪道の走破性は、後輪にLSDを搭載したフルタイム4WD車並みの高得点をあげたいと思います。
まとめ
いかがでしたでしょうか。
本システムはかなり画期的である事を、お分かり頂けましたでしょうか。
それではまとめです。
①トヨタのダイナミックトルクベクタリングAWDは、単なるトルクベクタリングが売りではなく、後輪への50%の駆動力を(デフに一切影響される事なく)ダイレクトに制御できる事が売りの、目から鱗の4WDシステムである。
②このため高速でカーブを曲がる場合だけではなく、悪路や雪道走行においても後輪にLSDを搭載したフルタイム4WD車並みの威力を発揮する。
③またディスコネクト機構により、完全に後輪への駆動系を遮断する機能をも有しており、1台でFFとフルタイム4WDとなる優れものである。
④もっと端的に言えば、燃費は大幅に改善されていながら、最新の電子制御と4輪駆動メカがてんこ盛りのランクル200やパジェロよりも雪道の走破性は上かもしれない。
トヨタが本機構を(トルクベクトリングではなく)トルクベクタリングと読んだり、(4WDではなく)AWDと呼ぶのは、従来とは異なるシステムだとう意味合いをどうしても込めたかったからではないでしょうか?
自動車評論家の皆さんも、是非当該解説図を十分理解してから新型RAV4を試乗して頂きたいものです。
驚くほど画期的だった、新型RAV4のダイナミックトルクベクタリングAWD