横並びで比較する
雪道に強い4WDシステムとは
Issued on Jan. 22, 2017
Added on Dec. 3, 2017
Added on Dec. 3, 2017
目次
7) アクティブ・オンデマンド4WD
次はアクティブ・オンデマンド4WDです。
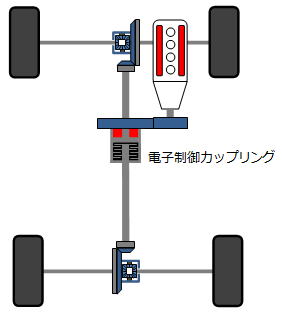
アクティブ・オンデマンド4WD
これは前述のパッシブ・オンデマンド4WDに付いていたビスカスカップリングの代わりに、より高度な電子制御カップリングを搭載しています。
恐らくこれは、現在のFFベースの4WD車として最も一般的なシステムではないでしょうか。
7-0) トヨタのアクティブトルクコントロール4WD
実際トヨタでは、1990年代後半以降のFFベース4WD車では、全てアクティブトルクコントロール4WDと呼ばれるこの方式の4WDシステムを採用しています。

ホンダオデッセイに対抗して急遽開発されたトヨタガイア
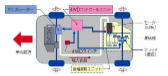
下の図は1998年に開発され、トヨタ・イプサムやガイヤに搭載されたアクティブトルクコントロール4WDのシステム図です。
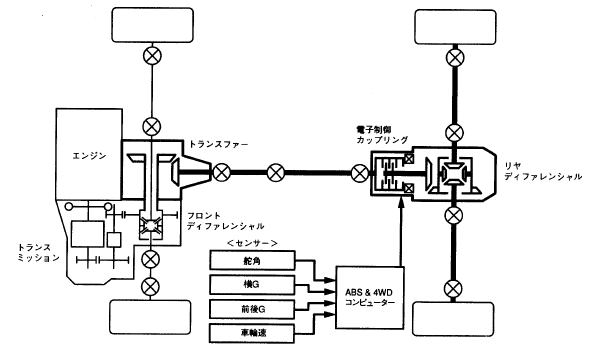
トヨタ・イプサムのアクティブトルクコントロール4WDシステム図
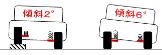
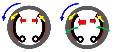
これは横置きエンジンの4WDですので、前段の図とは多少配置が異なりますが、電子制御で後輪の駆動力が制御されている事が分かります。
これによって、路面状況や運転状況に応じて、(実際にタイヤが滑り出す前に)2輪駆動(100:0)から前後輪直結4WD(50:50)まで可変できます。
また前述のパッシブ・オンデマンド4WDは、前後輪のスピード差によってコーナーでも後輪に駆動が掛かりましたが、この場合はFFのままの走行が可能です。
ただしこの場合でも、後輪が回れば駆動系が全て回転するのは同じですので、燃費向上は期待薄です。
なおこの場合は前後輪がオープンデフですので、1輪が空転すれば2輪駆動になるため、走破性はレベル7になります。
その後、SUVのレクサスRX、レクサスNX、ハリアー等から、ダイナミックトルクコントロール4WDと呼ばれる、4WDとステアリング、ブレーキ、駆動力を協調制御する4WDシステムに移行しましたが、4WDシステムの基本メカニズムは同じと思って構いません。
ただしその場合、簡易LSD(空転した車輪に制動を掛けて他の車輪に駆動を伝える)を備えていますので、走破性はレベル11になります。
7-1) マツダのi-ACTIVE AWD
マツダのi-ACTIVE AWDがこのアクティブ・オンデマンド4WDに当たります。

i-ACTIVE AWDを採用したCX-5
i-ACTIVE AWDの場合、通常走行は100:0のFF走行(実際には4輪駆動移行時のバックラッシュ除去のため僅かに後輪に駆動を掛けているとの事)ですが、ドライバーの操作と走行状況に応じて前後輪直結4WDの50:50まで可変します。
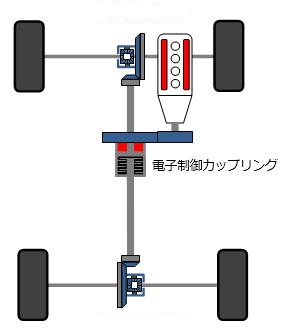
FFベースのアクティブ・オンデマンド4WD
このため雪道の走破性はレベル6と言いたい所ですが、更なるアドバンテージがあります。
それがTCS(トラクションコントロールシステム)によって、空転した車輪にブレーキを掛けて簡易的なLSD(リミテッド・スリップ・デフ)の働きをさせる機能です。
これによってかなり4輪直結パーマネント4WDに近い走破性が確保できますので、レベル11にしたいと思います。
7-1) マツダのi-ACTIVE AWD