横並びで比較する
雪道に強い4WDシステムとは
Issued on Aug. 18, 2017
目次
8. メカ式フルタイム4WD
8-6) アウディRS 5(第6世代クワトロ)
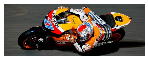
次はアウディRS 5に搭載された、第6世代クワトロです。

第6世代クワトロを搭載したAUDI RS 5
この第6世代クワトロは、通常は前輪40:後輪60のトルク分配で、もし前輪が滑れば最大で前後15:85、後輪が滑れば最大で前後70:30までトルクを可変させます。
一般的なアクティブ・オンデマンドの4WD車であれば、FFベースで100:0~50:50、FRベースで0:100~50:50です。
また、フルタイム4WDであればセンターデフをロックしたり解除したり、更にLSDを装着したりと色々あるものの、前後のトルク配分は基本的に一定です。
ところがこのクワトは、メカ的に前後15:85~70:30まで可変できるという優れものです。
アウディではこれを、Self-locking crown-gear centre diffrentialと読んでいます。
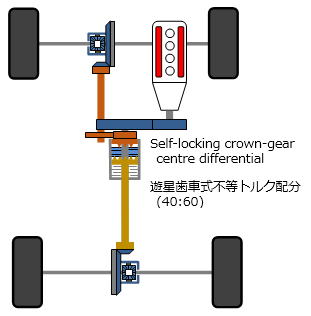
アウディRS 5に搭載された、第6世代クワトロ
ちなみにクラウンギアとは、一般的な円盤の側面に歯が付いているのではなく、王冠の様に円盤の軸方向に歯が付いています。

クラウンギア
動作原理については下の解説動画を見て頂ければと思いますが、色々勉強になりましたので、勝手に補足説明をさせて頂ければと思います。
前後輪のトルク配分を常時40:60にする方法
先ず目を引いたのが、前後輪のトルク配分を常時40:60にする方法です。
その方法ですが、下の図にあります様に、テコの原理を使っているのです。
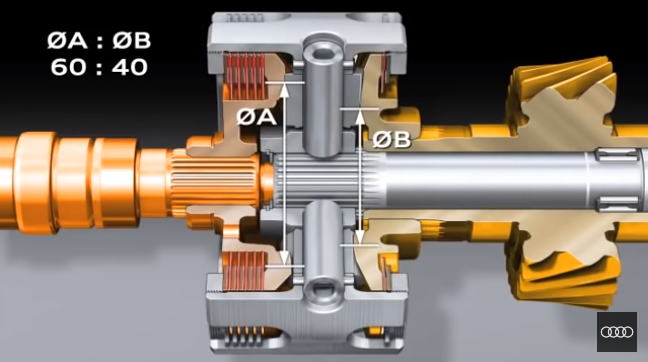
左側が後輪シャフト(銅色)で右側が前輪シャフト(金色)
具体的には、銅色の後輪駆動系と金色の前輪駆動系が銀色の遊星歯車と接触する位置が上の様に異なるのです。
すなわち直径Aと直径Bの長さが、6:4になっているのです。
これによって、前後輪は同じ回転数でありながら、トルクを6:4に分配されているのです
誰が考えた知りませんが、ウマイ手を考えたものです。
なお中央の遊星歯車に接触している部分が、クラウンギアになります。
入力軸はどこへ行った
それと(不要かもしれませんが)一つ補足しておきますと、下の図を見ると後輪を駆動する銅色の出力軸と、前輪を駆動する金色の出力ギアはあるものの、銀色のセンターデフを回転させる入力軸が見当たりません。

銀色のセンターデフを回転させる入力軸が見当たらない
どこにあるかと言えば、(上の図にはありませんが)エンジンからの入力軸は、下の図の様に金色の出力ギアの穴の中を通って、センターデフに接続されているのです。
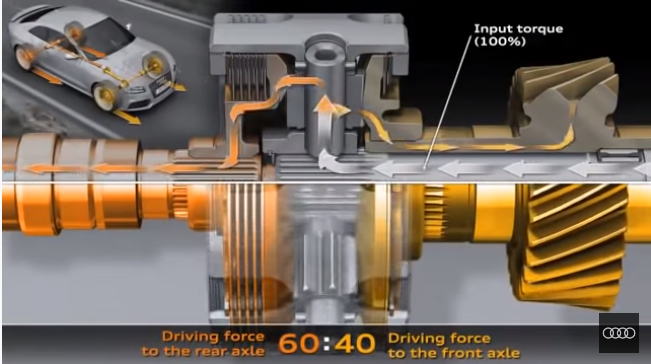
エンジン出力軸は前輪軸の中を通ってセンターデフに繋がっている
前後輪のトルクを変化させる方法
それでは次に、なぜ後輪や前輪が滑ると、前後輪のトルクが変化するのかご説明します。
その前にお伝えしておきたいのが、摩擦板です。
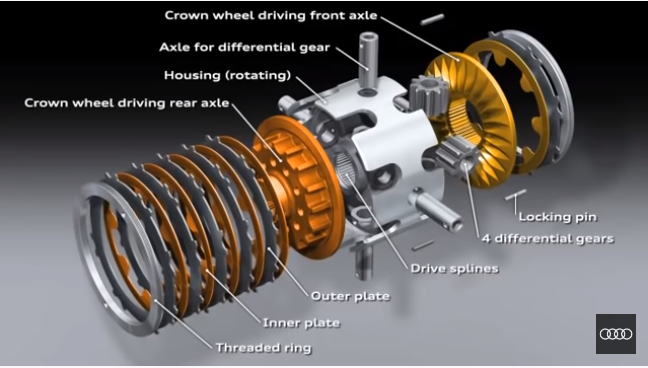
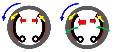
図左側にある5組の摩擦板と図右側にある1組の摩擦板
摩擦板とは、上の図の左側にあります10枚1組のInner plateとOuter Plateを指します。
Inner plateは外側の爪によってセンターデフ(駆動軸)と一緒に回転し、Outer Plateは内側の爪によって後輪軸と一緒に回転します。
なお上の図には直接触れられていませんが、前輪側にも一組の摩擦板があります。
そしてこれらの摩擦板は、前後輪が等速で回っている限り、相互に離れており何もしていません。
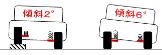
それでは、先ず前輪が滑った場合を考えてみます。
もしこの摩擦板が無いとしたら、一般的なオープンデフと一緒でエンジンの出力はどんどん前輪の方に逃げていってしまいますので、クルマはスタックしてしまいます。
ところがこのセンターデフの場合、下の図にあります様に、前輪が滑り出すと共に、グリップしている後輪側のトルクをどんどん増やしていくのです。
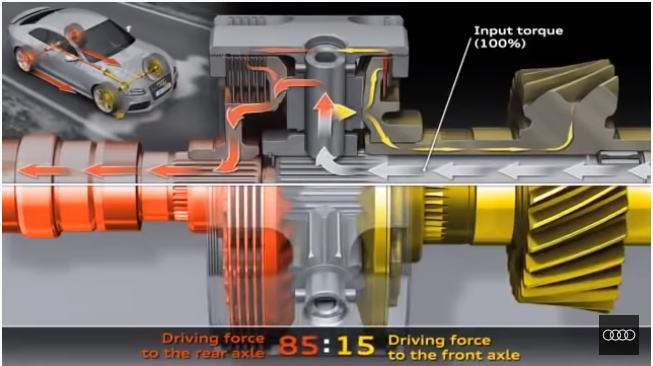
前輪が滑ると後輪側のトルクが増える
その理由は(この動画では殆ど触れていないのですが)、前後輪に回転差が生じると、それまで前後輪の軸は直結の様になっており回転していなかったセンターデフ内側の遊星歯車が回転を始めます。
すると前後輪の軸に回転差が生じるのですが、それと同時に後輪側の摩擦板が遊星歯車によって押され、5組の摩擦板が密着する事によって、エンジンの駆動が摩擦板を介して直接後輪軸に伝わる事になるのです。
この摩擦板が完全に直結(ロック)したとき、前後輪のトルク配分は85:15になるという訳です。
また逆に後輪が滑った場合は、前輪側の摩擦板によってエンジンの駆動が前輪の駆動軸に伝わり、トルク配分が最大で70:30まで変化する事になります。
この様に摩擦板がロックする事に伴って、Self-locking crown-gear centre differentialと呼んでいる様です。
ですが、ここで一つ疑問が湧いてきます。
なぜ摩擦板がロックすると、100:0とか0:100にならないで、85:15とか70:30になるのかでしょう。
その理由ですが、動画後半のナレーションにそれらしいヒントがあります。
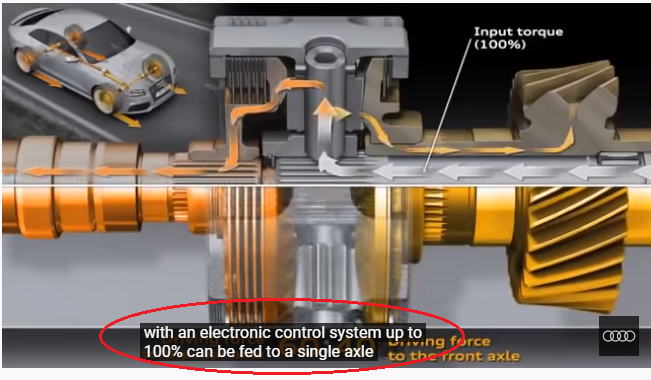
電子制御システムによって、一つの駆動軸に最大100%までトルクを掛けられる
上の字幕をご覧頂きます様に、電子制御システムによって、一つの駆動軸に最大100%までトルクを掛ける事ができる、とあります。
とは言え、このセンターデフの中のどこにも、それらしい電子制御部品は見当たりません。
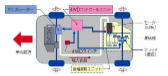
どういう事なのかと更に動画を見ていくと、本駆動システムにおいては4輪のブレーキを個々に制御する事によって、トルクベクタリングを可能にしているとの事です。

クワトロのトルクベクタリング機構
これを本格的なトルクベクタリングと呼ぶかどうかは別にして、これで謎が解けそうです。
恐らく先ほどお伝えしました様に摩擦板がロックしたら、エンジンの駆動力は100:0(もしくは0:100)になるのでしょう。
ですがさすがにそこまでは必要ないので、例えば前後輪のトルク配分が15:85を超えそうになれば、前輪のタイヤにブレーキを掛けて、前後15:85を超えない様に制御しているのでしょう。
さて、そこまで分かった所で、このクルマの雪道での走破性を考えてみます。
前後輪のトルクの可変幅が大きいというのが、本4輪駆動システムの最大の特徴です。
ですが、何だかんだと言っても雪道では常時4輪に同じトルクが掛かっているのが一番いだろうというのが本サイトの主張です。
ですので、センターにメカ式LSDを搭載しているフルタイム4WDのスバルWRX STIや三菱ランエボと同じレベル16にしたいと思いますが、いかがでしょうか。
8-6) アウディRS 5(第6世代クワトロ)
/8) メカ式フルタイム4WD/雪道に強い4WDシステムとは
/8) メカ式フルタイム4WD/雪道に強い4WDシステムとは